
Una soluzione innovativa basata sull’interazione uomo-robot.
Un gruppo di studio dell’Università Nazionale della Scienza e della Tecnologia di Seul ha creato Palletrone, una piattaforma multirotore completamente attuata, ossia con un motore o un attuatore per ogni grado di movimento per un controllo accurato nelle varie direzioni e rotazioni.
L’apparecchio è pensato per gestire il trasporto di carichi su un’ampia superficie piatta superiore, con una maniglia laterale simile a quella di un carrello per la spesa.
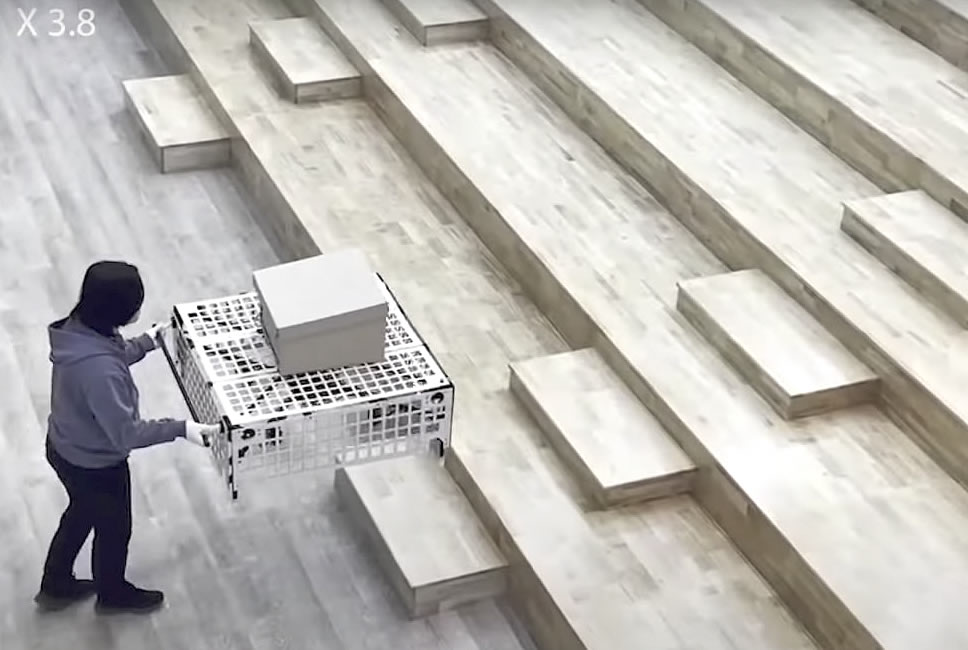
Gli spostamenti sono determinati da un umano che imprime forze di controllo tramite il supporto, mentre un algoritmo verifica l’assetto mantenendo a zero i movimenti laterali e le rotazioni.
I trasporti convenzionali su ruote hanno difficoltà su terreni irregolari o con scale e dislivelli. Il drone-carrello supera facilmente queste sfide grazie alle capacità aeree.
Come funziona il sistema di controllo
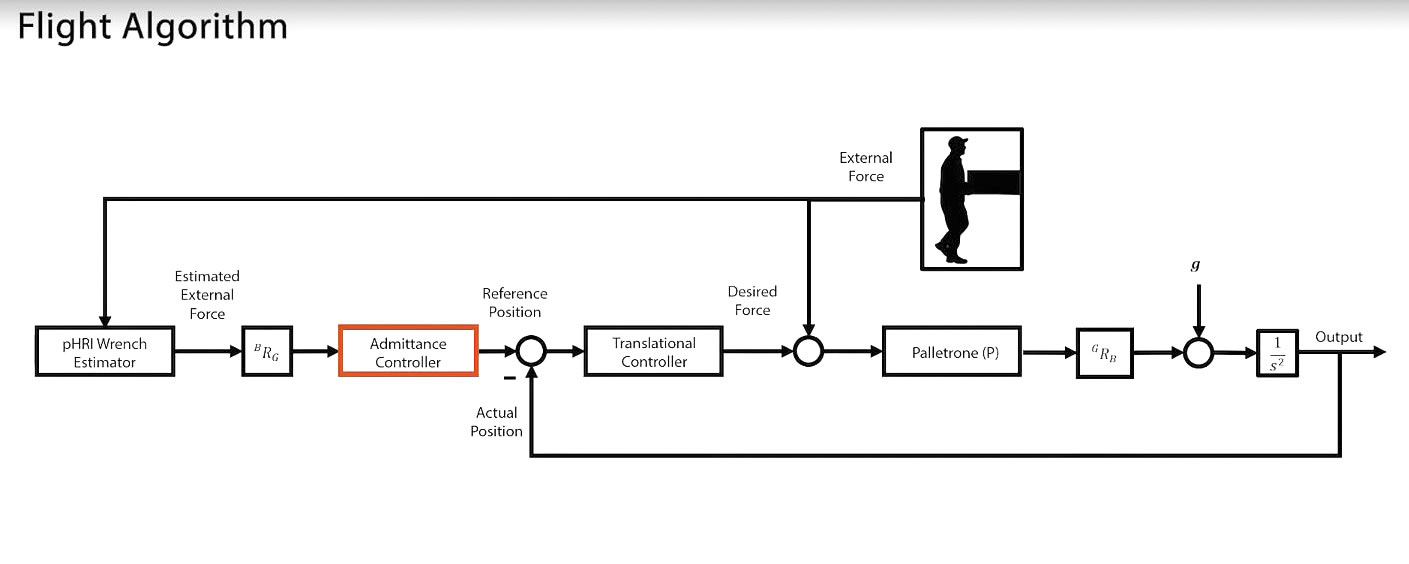
Per gestire il volo viene impiegato un controller di ammettenza per rispondere alle forze applicate dall’operatore (come spingere o tirare) invece di resistere attivamente. In questa maniera la traiettoria del volo si adatta a queste forze, conferendo al drone un comportamento più naturale e fluido.
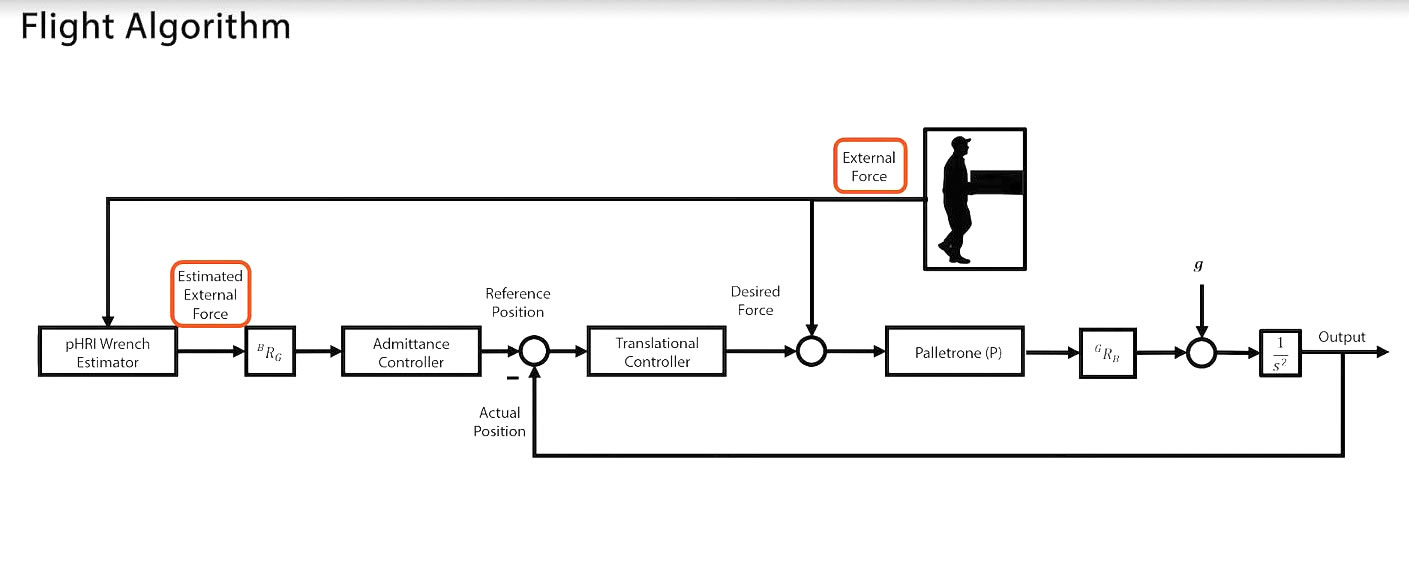
Tuttavia, le forze esterne esercitate dagli utenti non solo alterano il percorso, ma possono causare errori interferendo con il processo di generazione di wrench (ovvero forze e momenti) utilizzati per il controllo preciso.

Per superare il problema della compensazione delle forze esterne nelle iterazioni è stato introdotto un algoritmo di controllo di disturbi (DOB).
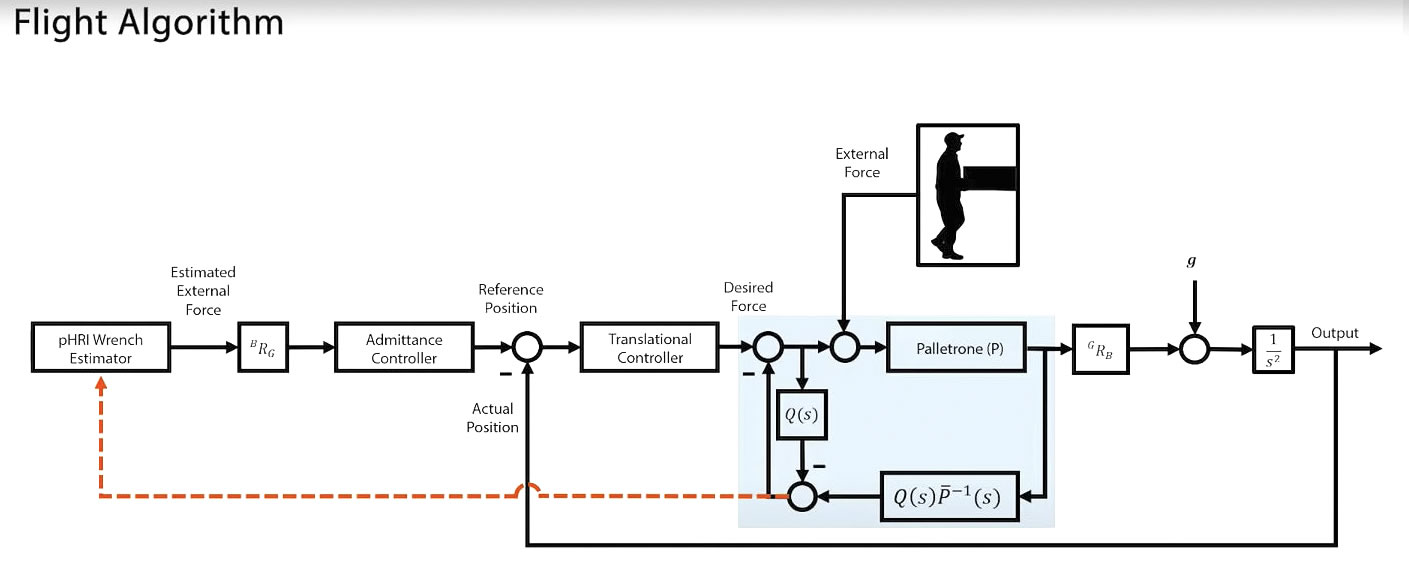
Dato che il DOB integra una stima delle forze esterne, gli sviluppatori (fra cui Geonwoo Park come primo autore dello studio) hanno usato queste stime come input per il controller di ammettenza.
In altre parole, il sistema non solo reagisce alle forze esercitate, ma è anche in grado di anticiparle grazie alla stima dei disturbi fornita dall’osservatore. Questo approccio semplifica il design del controller, rendendolo più efficiente dal punto di vista computazionale poiché elimina la necessità di un algoritmo separato per valutare le forze esterne.
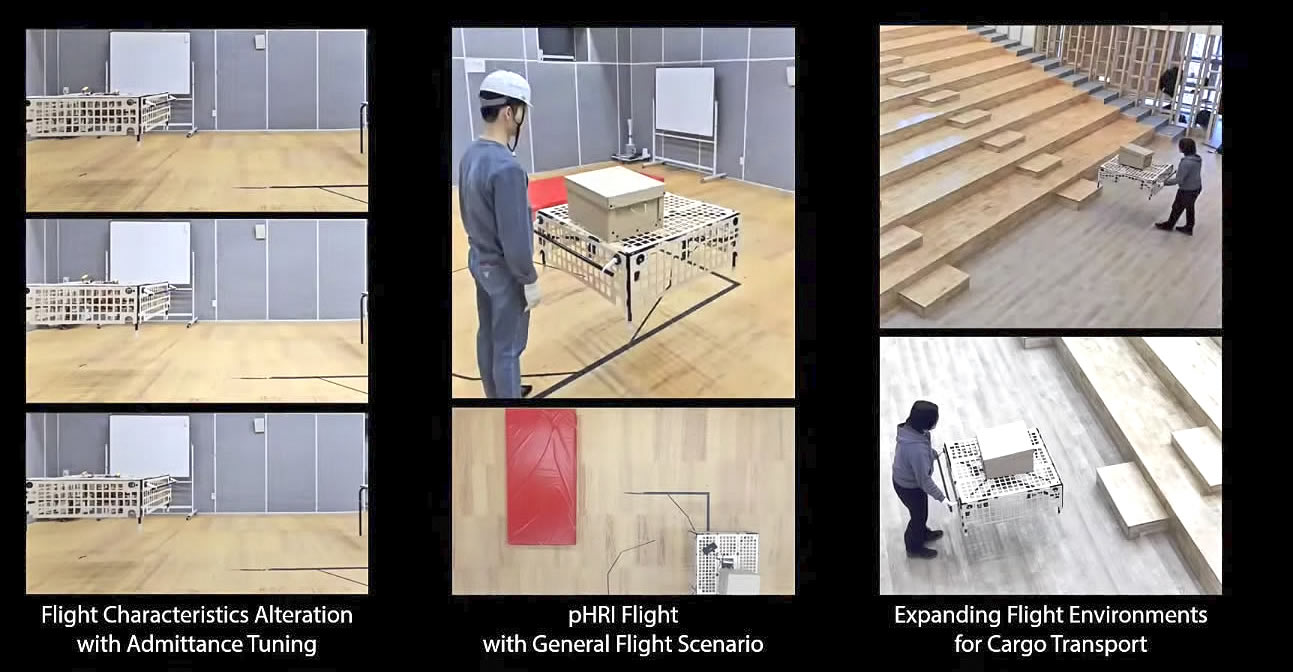
Le prestazioni di volo sono state validate con tre esperimenti.
Nel primo test, gli ingegneri hanno collegato una corda ad un peso tramite una puleggia lasciando cadere il peso. L’obiettivo era capire in che modo la modifica dei parametri del controller di ammettenza influenzi la risposta del drone alle forze esterne (come la trazione della corda) e come questo cambi il comportamento del drone. Sono stati provati tre diversi valori di ammettenza, registrando le differenze nelle traiettorie e nelle forze osservate.

Nel secondo caso, si è testato uno scenario di volo reale in cui un umano afferra il Palletrone guidandolo lungo un percorso arbitrario.
L’assetto di rotazione laterale ed il beccheggio sono mantenuti costantemente a zero, garantendo un’interazione intuitiva e sicura, oltre a dare stabilità al carico. Questo esperimento conferma che il drone può adattarsi ai movimenti di chi lo porta, come se fosse un carrello della spesa, ma con la capacità di volare e regolare l’altitudine in base ai comandi ricevuti.

Nell’ultimo collaudo, si è ampliata l’area di volo mettendo alla prova Palletrone in ambienti con scale dove il ripiano rimane stabile, anche durante la fase di carico scarico quando il dispositivo staziona dove l’operatore lo lascia senza variazioni nell’assetto di volo (hovering), seguendo poi fedelmente le traiettorie modificate indotte dal conducente.
Se volete vedere il drone carrello in azione, il video è su YT.
RIPRODUZIONE RISERVATA – © 2024 SHOWTECHIES – Quando la Tecnologia è spettacolo™ – E’ vietata la riproduzione e redistribuzione, anche parziale, dell’articolo senza autorizzazione scritta. Se desideri riprodurre i contenuti pubblicati, contattaci.
Foto/Screenshot: Seoultech

Commenta per primo