
La modalità di locomozione sovrattivata consente di manipolare gli oggetti in modo ottimizzato basandosi sulla pianificazione del percorso di contatto implicito non impulsivo.
I rettili si spostano usando tecniche adatte a diversi ambienti o attività. L’ondulazione laterale, basata sull’attrito anisotropico, spinge in avanti in una traiettoria sinusoidale impiegata su terreni scivolosi o sabbiosi. In spazi ristretti, i serpenti adottano invece il movimento a fisarmonica che comporta la compressione e l’espansione controllate delle spire per facilitare il moto longitudinale.
Inoltre, maniere di procedere non convenzionali, come la slinky o la ruzzolante, sfruttano la struttura articolata del corpo, tipica di rettili e vermi, per modelli unici.

Un gruppo di studenti della Northeastern University (un ateneo privato di Boston, Stati Uniti), coordinato dall’assistente professore d’ingegneria elettrica ed informatica Alireza Ramezan, sta indagando le capacità di loco-manipolazione agevolate dalle configurazioni corporee ridondanti di un robot serpente chiamato COBRA, in particolare per quanto riguarda le sue interazioni con gli oggetti.
La sfida presenta prospettive per l’ottimizzazione implicita del contatto, un paradigma di progettazione prevalente nella ricerca sulla locomozione che, inspiegabilmente, è abbastanza inesplorato.
La piattaforma è stata sviluppata nell’ambito della BIG Idea Competition promossa dalla NASA, risultando vincitrice nel 2022.

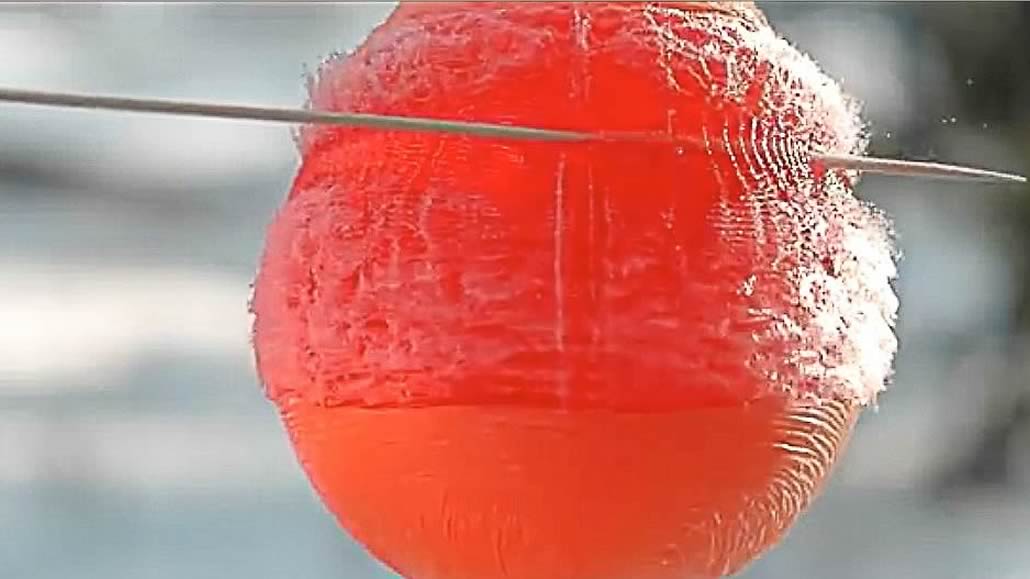
Il team stesso è rimasto colpito dalle prestazioni del robot che, dopo un iniziale perplessità, ha ricevuto elogi dalla NASA e dai partner industriali desiderosi di lanciarlo per l’esplorazione della Luna, dopo averlo visto trasformarsi in un anello esagonale e precipitare giù da una collina di 50 metri senza subire danni.
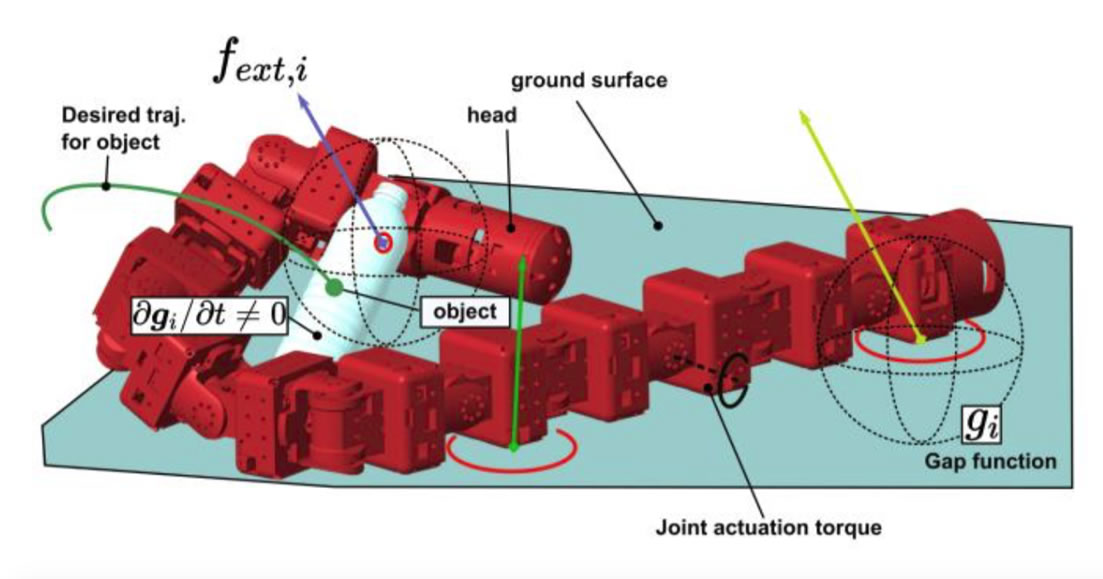
Il robot è composto da undici giunti attuati. Nel segmento frontale sono posizionati i moduli del controllo computerizzato, di comunicazione ed un’unità di misura inerziale (IMU) utilizzata per la navigazione. La sezione posteriore ospita un modulo di carico utile intercambiabile con componenti elettronici aggiuntivi.
Realizzato con la stampa 3D, il dispositivo pesa solo 20 libbre, circa 9 chilogrammi, un netto vantaggio rispetto alle invenzioni della concorrenza che arrivano a 200 libbre. La leggerezza è conveniente in rapporto al costo di un lancio pari a 1 milione di dollari al chilo.
COBRA si muove su un terreno pianeggiante usando l’avvolgimento laterale, mentre la caratteristica di assumere la forma di un anello rotante, collegando la testa e la coda, lo rendono perfetto per esplorare crateri lunari difficili da navigare e che gli scienziati sospettano contengano acqua ghiacciata.

Il design trasformativo e bio-ispirato è strategico perché sulla Luna esistono vari ostacoli, come grandi rocce, superabili con il sidewinding tipico dei serpenti che viaggiano su una superficie sabbiosa, simile a quella lunare.
Un documento, pubblicato l’8 maggio 2024 su arXiv con lo studente laureato Adarsh Salagame come primo autore, mostra i risultati ottenuti con Matlab Simulink, un software per la modellazione, simulazione ed analisi di sistemi dinamici che consente di studiare parametri come le forze di contatto con il suolo e le interazioni con gli oggetti.
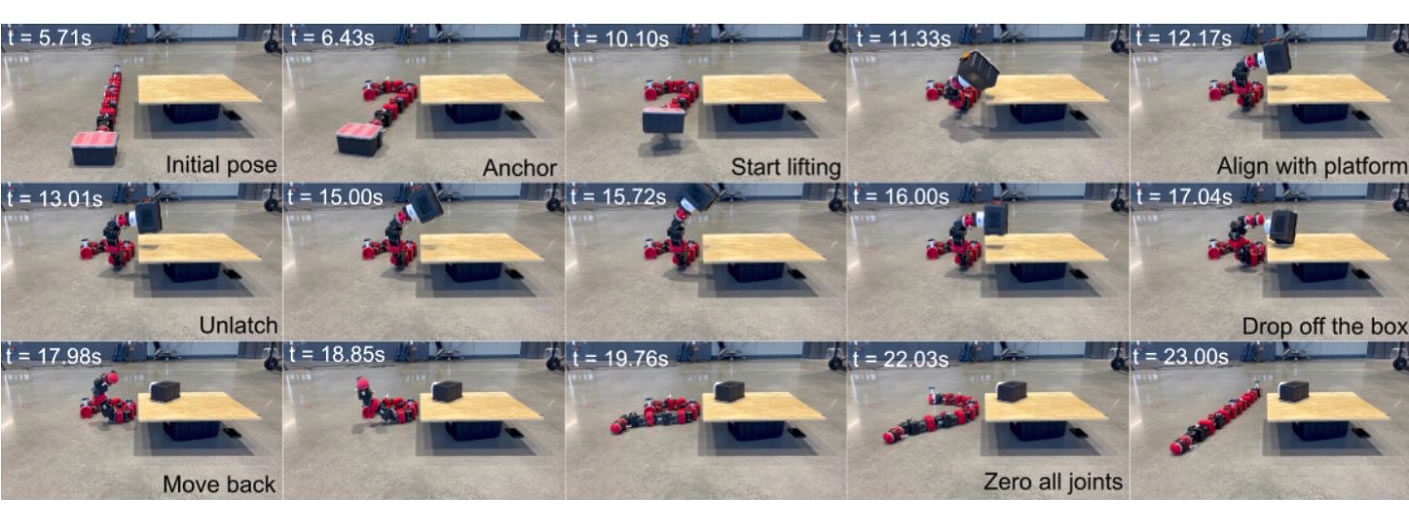
Nell’immagine 4 si vede la progressione di COBRA che solleva un oggetto da terra e lo posiziona su una piattaforma rialzata di 0,3 m. Il robot inizia con il carico agganciato al modulo testa, la coda è arricciata per aumentare la regione di supporto consentendogli di rimanere in equilibrio mentre solleva il peso fino ad un’altezza di 0,4 m. Una volta spostata la scatola sulla zona rialzata, l’oggetto è sganciato scuotendo la testa.
Il compito affrontato non è banale dato che quando si dispone di numerosi contatti con il terreno, si ha molto slittamento e cedevolezza delle articolazioni, causa di errori.
Il gruppo della Northeastern si sta già concentrando sull’espansione della suite di sensori per aiutare il robot a rilevare l’acqua ghiacciata della luna, aggiungendo radar e telecamere ad infrarossi. Un potenziale partner tecnologico ha fornito uno spettrometro di neutroni appositamente progettato per individuare la presenza di acqua.
PUNTI CHIAVE
Il sistema è sovrattivato: grazie alla presenza di una ridondanza di attuatori rispetto a quelli necessari per eseguire un determinato compito. Questa sovrabbondanza permette una maggiore flessibilità e capacità di controllo.
La pianificazione del percorso di contatto implicita avviene senza bisogno d’istruzioni esplicite per ogni singola azione.
Non impulsivo indica che i movimenti sono fluidi e controllati, garantendo precisione e stabilità nel processo di manipolazione.
RIPRODUZIONE RISERVATA – © 2024 SHOWTECHIES – Quando la Tecnologia è spettacolo™ – E’ vietata la riproduzione e redistribuzione, anche parziale, dell’articolo senza autorizzazione scritta. Se desideri riprodurre i contenuti pubblicati, contattaci.
Foto: Salagame e Alyssa Stone/Northeastern University

Commenta per primo