
La tecnica Model Predictive Control adatta il software per insegnare ad un robot ad afferrare oggetti, mantenersi in equilibrio, correre ed eseguire un’acrobazia degna di un abile skater.
Boston Dynamics è un’azienda statunitense specializzata in ingegneria e robotica fondata nel 1992 come spin-off del MIT, ma ora di proprietà di Hyundai Motor Group dopo essere appartenuta a Google per qualche anno.

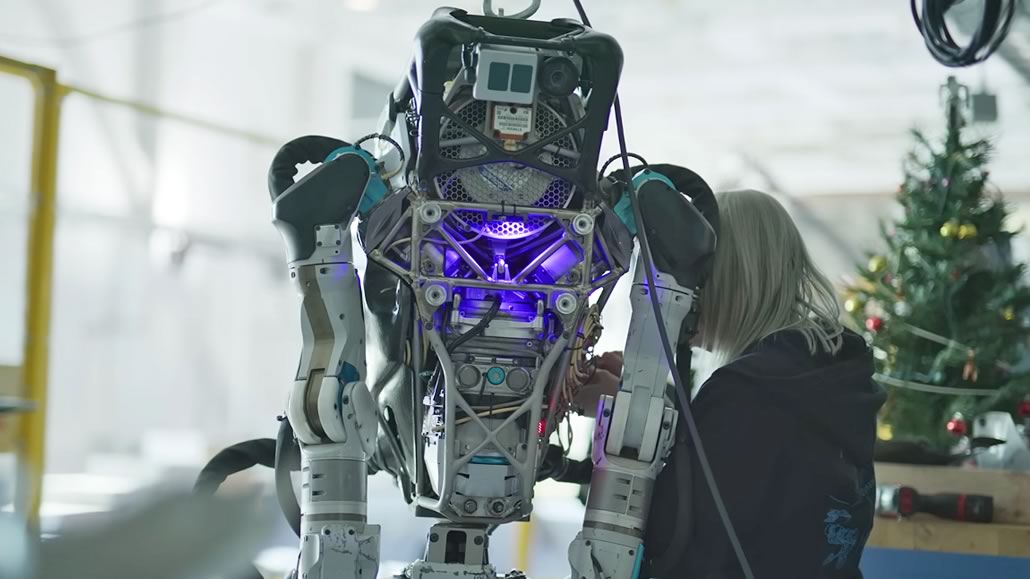
A metà gennaio 2023, la società ha pubblicato un video per comunicare i progressi nelle evoluzioni dell’umanoide Atlas inserito dai ricercatori in un ambiente di lavoro per studiare come dovrebbe percepire e manipolare gli oggetti garantendo prestazioni di alto livello.
All’inizio del filmato, un uomo su un’impalcatura si accorge di aver dimenticato la borsa degli attrezzi, per rimediare prende il cellulare ed invia un comando al robot ai piedi della struttura che gira la testa a destra ed a sinistra per individuare la sacca.
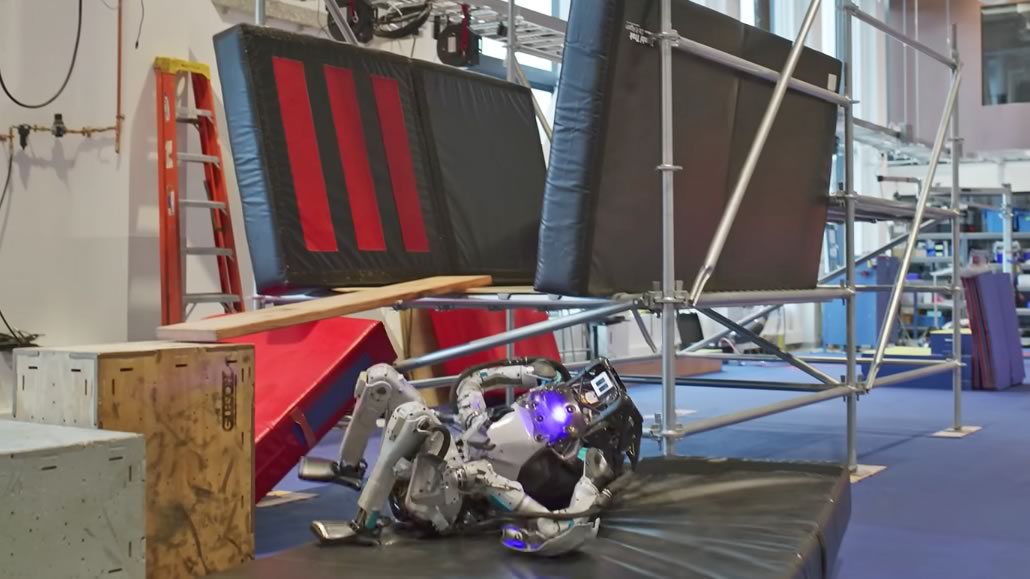
Lo staff tecnico ha preparato sequenze che impressionano, fra cui un salto mortale con rotazione dove l’umanoide si muove con l’agilità di uno skater.
Il sistema deve bilanciare la massa del robot in rapporto a forma e proprietà della massa degli elementi che tratta facendo subito riferimento alla stabilità ed alla manipolazione ossia la capacità di maneggiare un oggetto per spostarlo nello spazio.
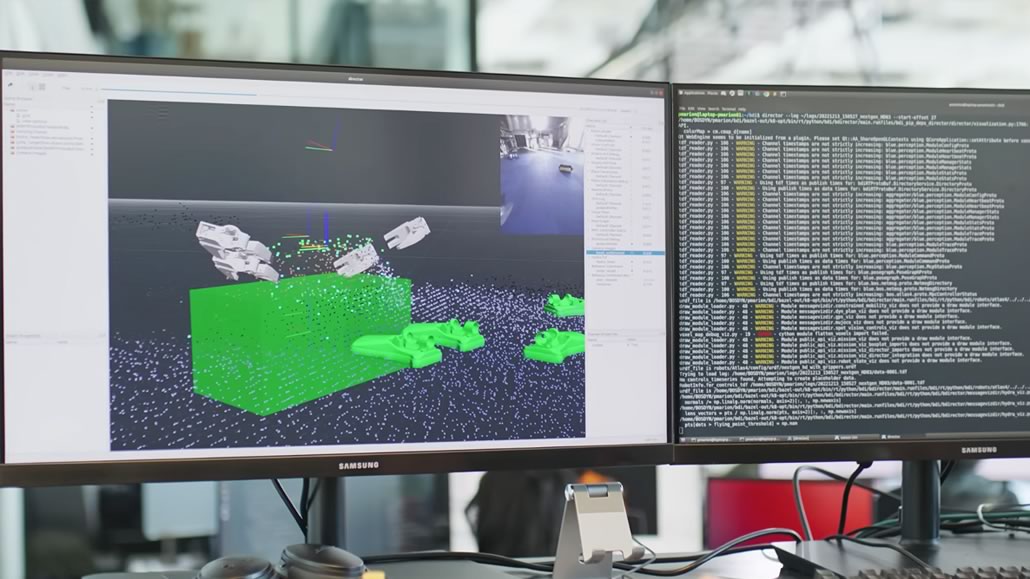
Pat Marion segue il progetto occupandosi della percezione e dell’autonomia e spiega che la prima fa in modo che il robot sappia cosa vede mentre la seconda fa scegliere cosa fare nello step successivo. I dati raccolti dalle due telecamere, una per il colore l’altra per la profondità di campo, sono processati da Atlas attraverso computer.
La tecnica alla base dell’operatività è chiamata Model Predictive Control (MPC), in pratica è una descrizione di come le azioni del robot influenzeranno il suo stato e si usa per prevedere l’evoluzione in un breve lasso di tempo.
L’ottimizzazione ricerca le alternative possibili da intraprendere per raggiungere al meglio il compito prefissato aggiornando costantemente la previsione dello stato futuro per scegliere le mosse in tempo reale.
Un modello semplice perde dettagli importanti sulla dinamica, all’opposto uno complesso potrebbe richiedere troppi calcoli da svolgere. In entrambi i casi l’imprecisione porta a soluzioni errate che per Atlas, generalmente, si traducono in una caduta.

La precedente elaborazione per parkour e danza considerava solo il centro totale di massa del robot e l’inerzia al momento di decidere dove mettere i piedi e la forza sul terreno.
Per il lavoro in cantiere, si è valutato il movimento di ogni articolazione, la quantità di moto delle singole giunture e le forze applicate su cosa trasporta o lancia.

In questa maniera l’umanoide riesce a trasportare un oggetto pesante mantenendo l’equilibrio, saltare mentre fa un lancio e piegare le gambe per bloccare l’atterraggio alla fine di un capovolgimento in aria.
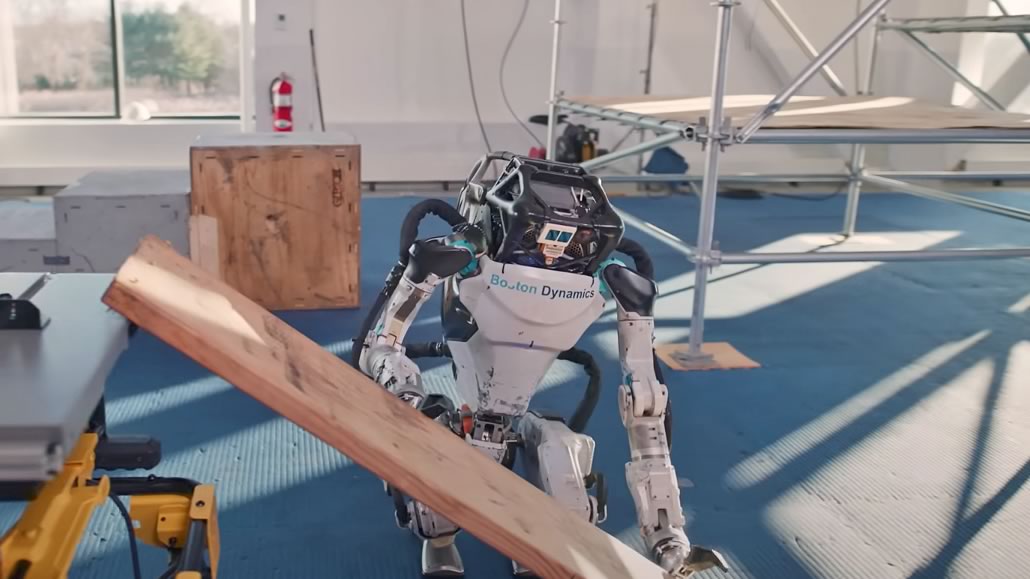
Nel filmato, Atlas prende una tavola di legno del peso di circa 7,5 kg, la trasporta e la posa per poi correrci sopra. Per abilitare questo comportamento si permette al controller di selezionare le forze che agiscono tra robot ed oggetto prevedendo l’effetto sulla quantità di moto di entrambi. Questo consente una ripianificazione continua della traiettoria futura dell’asse partendo dalla stima migliore dello stato attuale.
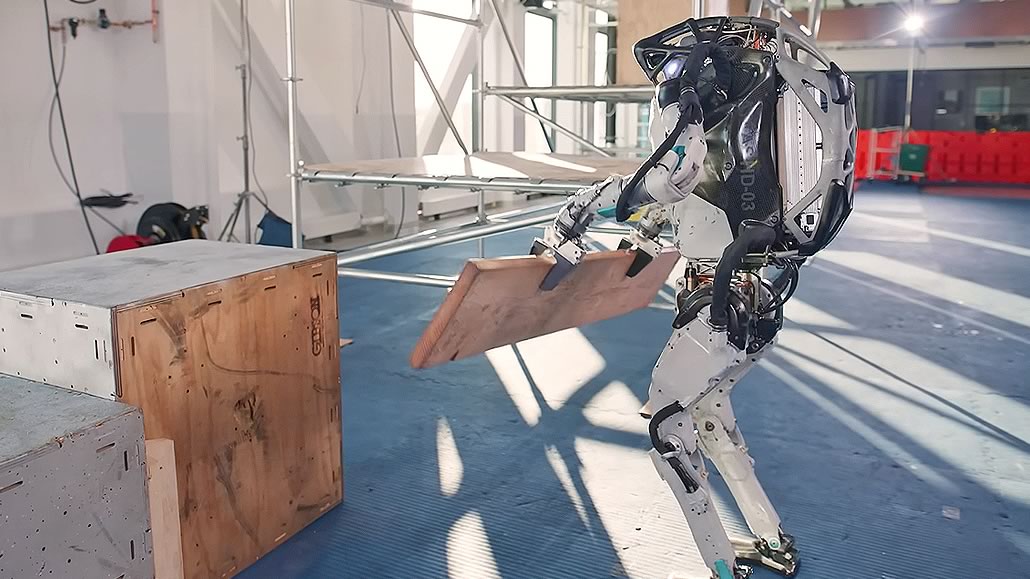
La natura predittiva significa anche che il controller regoli un leggero spostamento indietro del corpo del robot per raccogliere un oggetto molto pesante.

Quando le cose non vanno come previsto e il robot è perturbato durante l’esecuzione di un’attività di manipolazione, il controller ha la facoltà di effettuare compromessi intenzionali tra equilibrio ed il raggiungimento della posa desiderata.

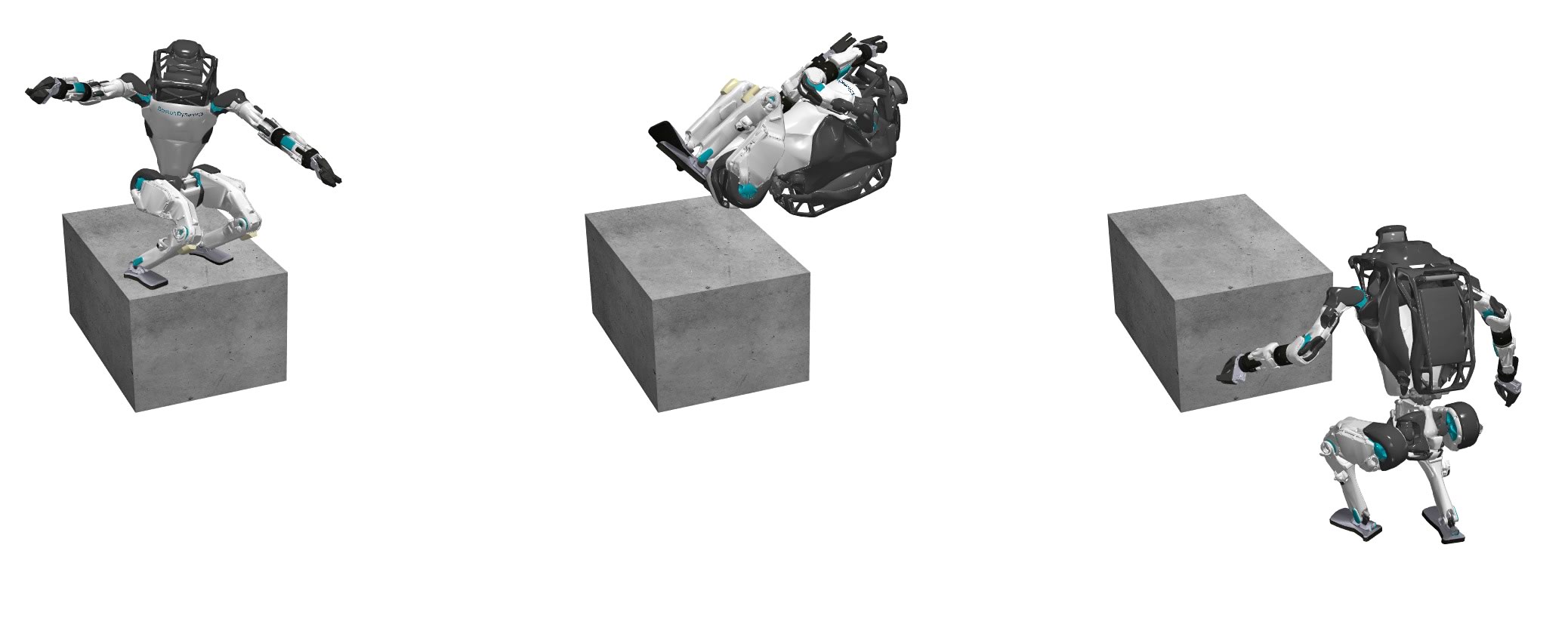
Pianificare in anticipo una traiettoria per l’oggetto e dire al controller di seguirla il più vicino possibile limiterebbe il mantenimento dell’equilibrio. In una simulazione al computer Atlas è colpito da un pallone da basket che viaggia a 20 metri al secondo, il robot sfrutta l’inerzia del palo che sta trasportando come un funambolo, mentre senza il carico (a destra nell’immagine) cade.
E veniamo al salto mortale carpiato, con una rotazione di circa 540° seguita da un perfetto atterraggio, il cosiddetto “sick trick“.
Jacob Welner, Animation Software Developer, ha progettato il comportamento come un’animazione di un videogioco chiedendo poi al sistema di eseguirla nella realtà ricorrendo a costanti aggiustamenti.

Al robot è stata data la capacità di gestire il suo movimento in aria muovendo braccia e gambe per modificare l’inerzia evitando collisioni con se stesso, in particolare si sono imitati gli skater.
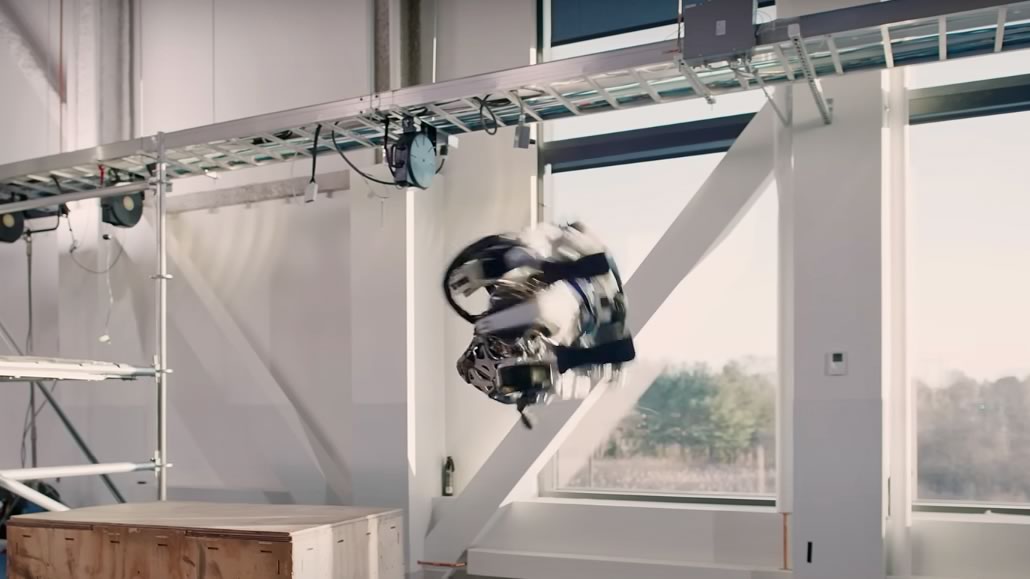
L’intera sequenza dura solo un secondo ed è spettacolare.

Queste prove testano sul campo i limiti per migliorare hardware e software sviluppando umanoidi adatti all’impiego in fabbriche, cantieri o in situazioni pericolose come nel caso di disastri ambientali o incidenti.
Guardate Atlas in azione su YT.
RIPRODUZIONE RISERVATA – © 2023 SHOWTECHIES – Quando la Tecnologia è spettacolo™
Immagini/Screenshot: Boston Dynamics



Articolo interessantissimo su come usare il modulo di Ai.
Giusto pensare alle situazioni pericolose, ma avevo letto di robot per anziani costruiti in Giappone. Mille volte meglio un robot alle case di riposo lager. A che punto sono nello sviluppo? Li venderanno mai in Europa a prezzi umani? Grazie
Un approccio metodologico interessante. Vediamo fin dove arriveranno
Dicono quanti computer ha addosso il robot?
Quanto vorrei far parte del progetto. La metodologia adottata è stata spiegata molto bene e le videate di codici dicono quanta AI c’è dietro.