
Maggiore mobilità degli arti inferiori, rotazione completa del torso e controlli avanzati per funzionalità sempre più efficienti.
L’innovazione nei robot antropomorfi risiede nell’abilità di replicare movimenti umani complessi in ambienti dinamici e non strutturati.
In uno scenario in cui flessibilità ed autonomia sono fondamentali, si preferisce usare l’Artificial General Intelligence.
L’AGI è un sistema di intelligenza artificiale con l’obiettivo teorico di comprendere, apprendere ed applicare conoscenze per eseguire qualsiasi compito cognitivo umano. A differenza dell’AI generativa, specializzata nella creazione di contenuti come immagini, testo o musica impiegando reti neurali profonde e grandi modelli linguistici, l’AGI è caratterizzata da una generalizzazione avanzata.
Questo significa che può imparare ed adattarsi a nuovi incarichi senza necessità di addestramento specifico.
LimX Dynamics è un’azienda cinese che registra traguardi notevoli, a livello mondiale, nella realizzazione di robot multiuso potenziati dall’intelligenza artificiale.
La gamma di prodotti è suddivisa fra umanoidi, quadrupedi su ruote, soluzioni software e hardware specifiche del settore. La diffusione copre diversi ambiti, fra cui: assemblaggio di automobili, ispezioni industriali, logistica e distribuzione, operazioni speciali e servizi domestici sia in mercati B2B che B2C.
Il video con le ultime novità del robot umanoide avanzato di LimX sta rapidamente conquistando l’attenzione degli esperti per i progressi mostrati che includono:

- Lie Down (Sdraiarsi): le gambe del robot sono ora in grado di piegarsi ed estendersi con angoli molto ampi.
Importanza: L’agilità è decisamente migliorata in situazioni che richiedono posture naturali o manovre a bassa altezza, come spostamenti in spazi ristretti o l’assunzione di posture salde per evitare cadute.
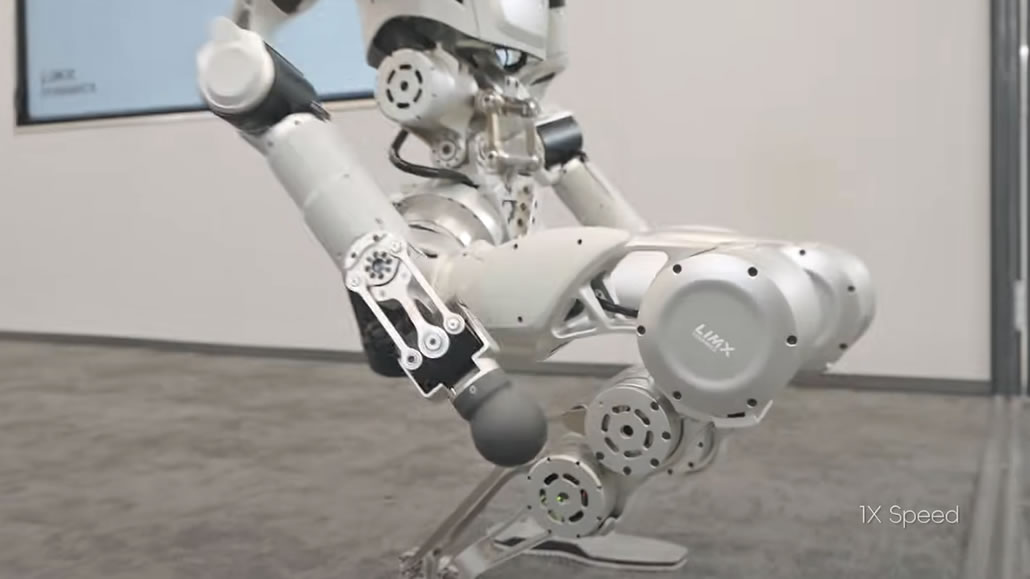
- Parallel Squat (Accosciata parallela o piegamento su gambe in parallelo): i nuovi attuatori potenziati consentono una maggiore variazione di altezza durante il movimento, accompagnata da un controllo avanzato dell’equilibrio corporeo.
Importanza: La capacità di variare l’altezza e mantenere l’equilibrio in modo dinamico è adatta ad applicazioni che esigono forza, stabilità e flessibilità, come il sollevamento di oggetti pesanti o l’interazione con superfici irregolari.
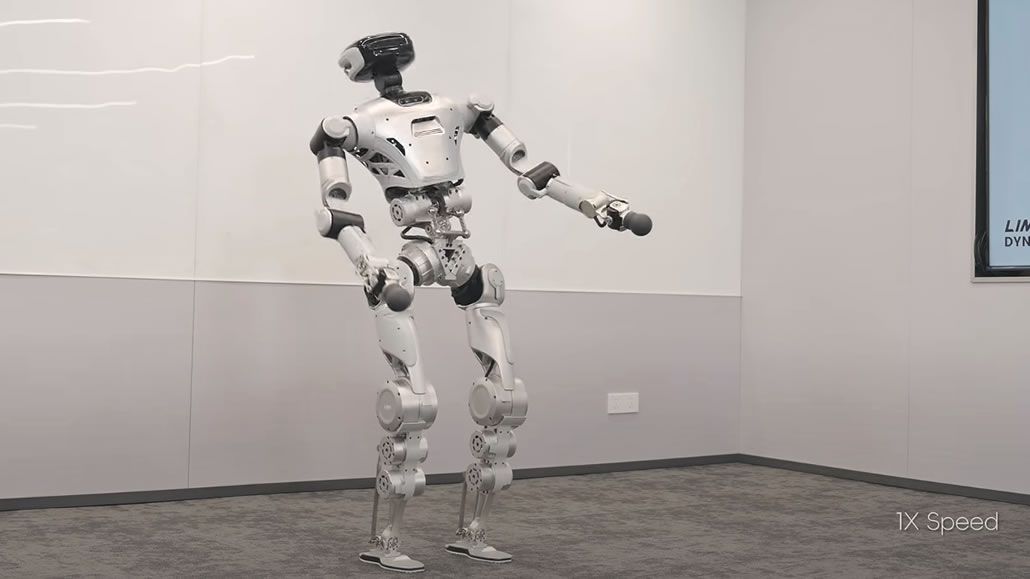
- Waist Rotation (Rotazione del busto): il torso ruota in maniera omnidirezionale su un’ampia gamma di movimenti.
Importanza: Questo aggiornamento offre una maggiore versatilità per mansioni multitasking.

- Lift Up and Stand (Sollevamento e stazionamento): Le articolazioni dell’anca sono state incrementate per permettere una rotazione superiore a 360°.
Importanza: si coordinano con grande precisione e fluidità le transizioni articolate, come passare dalla posizione seduta a quella eretta.

Senza ulteriori dettagli tecnici da parte di LimX Dynamics, si può ipotizzare che queste innovazioni siano state possibili grazie a progressi nei sistemi di attuazione ad alta potenza, nel controllo basato su modelli dinamici completi e nell’ottimizzazione degli algoritmi di coordinazione motoria con feedback in tempo reale.
LimX Dynamics si è specializzata in tecnologie avanzate, tra cui il controllo predittivo basato su modelli (Model Predictive Control), l’apprendimento per rinforzo (Reinforcement Learning) ed il controllo di coppia ad alta frequenza.
Queste risorse facilitano una comprensione approfondita delle capacità fisiche intrinseche del robot. Utilizzando informazioni sul terreno relative al corpo del robot, insieme allo stato in tempo reale (posizione, orientamento, angoli articolari, etc), il sistema calcola:
– Il punto ideale di arrivo.
– L’entità delle forze di interazione.
– La velocità di movimento.
Il tipo di approccio si presta ad un’interazione ottimale tra il robot e l’ambiente, senza dimenticare il contributo fornito dall’infrastruttura. LimX Dynamics ha elaborato un sistema operativo distribuito in tempo reale con tre elementi chiave:
- Catena di strumenti integrata per perfezionare lo sviluppo degli algoritmi.
- Trasmissione dei dati in tempo reale per garantire un accurato funzionamento del robot.
- Gestione decentralizzata dei nodi per bilanciare la potenza computazionale, creando un sistema adattabile, efficiente e stabile. In pratica, il carico di lavoro viene suddiviso tra i vari nodi in modo che nessuno sia sovraccarico.
Inoltre, il sistema supporta diversi linguaggi di programmazione per soddisfare differenti esigenze tecniche.
Il video originale è stato pubblicato su YouTube.
RIPRODUZIONE RISERVATA – © 2025 SHOWTECHIES – Quando la Tecnologia è spettacolo™ – E’ vietata la riproduzione e redistribuzione, anche parziale, dell’articolo senza autorizzazione scritta. Se desideri riprodurre i contenuti pubblicati, contattaci.
Screenshot da video: LimX Dynamics


Commenta per primo