
L’umanoide muscolo-scheletrico che imita in dettaglio il corpo umano, ha sensori ridondanti ed una struttura flessibile.
Numerose organizzazioni stanno realizzando ricerche sulla guida autonoma facendo registrare progressi in determinati compiti, come la manovra del parcheggio. Le auto vengono dotate di potenti fotocamere, LiDAR, GPS e diversi processori per garantire precisione e sicurezza.
Alcuni studi si focalizzano sull’impiego di umanoidi equipaggiati di vari sensori per gestire informazioni visive, acustiche e di forza. Sfruttando l’integrazione di questi dispositivi, il robot può salire in macchina e guidare, aggiungendo funzioni, come il trasporto dei bagagli pesanti, l’assistenza agli anziani ed il soccorso in caso d’incidenti.
Per raggiungere questi obiettivi bisogna tenere in considerazione che l’automa non ha la flessibilità del nostro corpo e deve diventare compatibile con misure e comandi pensati per standard umani, pur avendo altre dimensioni.
Sebbene esistano differenti tipi di robot umanoidi, il modello muscolo-scheletrico è quello che imita il sistema di attuazione umano agendo non con motori disposti su ciascun asse, ma con attuatori pneumatici o muscolari adatti ad un contesto ambientale complesso.
Scienziati dell’Università di Tokio hanno pubblicato un lavoro sulla rivista Robotics and Automation con primo autore Kento Kawaharazuka, assistente professore presso il Dipartimento di Meccatronica alla scuola di specializzazione in Scienze e Tecnologie. Il team era composto anche da un consulente Toyota.
Lo studio presenta il progetto di guida autonoma da parte di umanoidi muscolo-scheletrici descrivendo le caratteristiche e le sperimentazioni dell’hardware e del software basato sull’apprendimento per muovere il corpo flessibile.
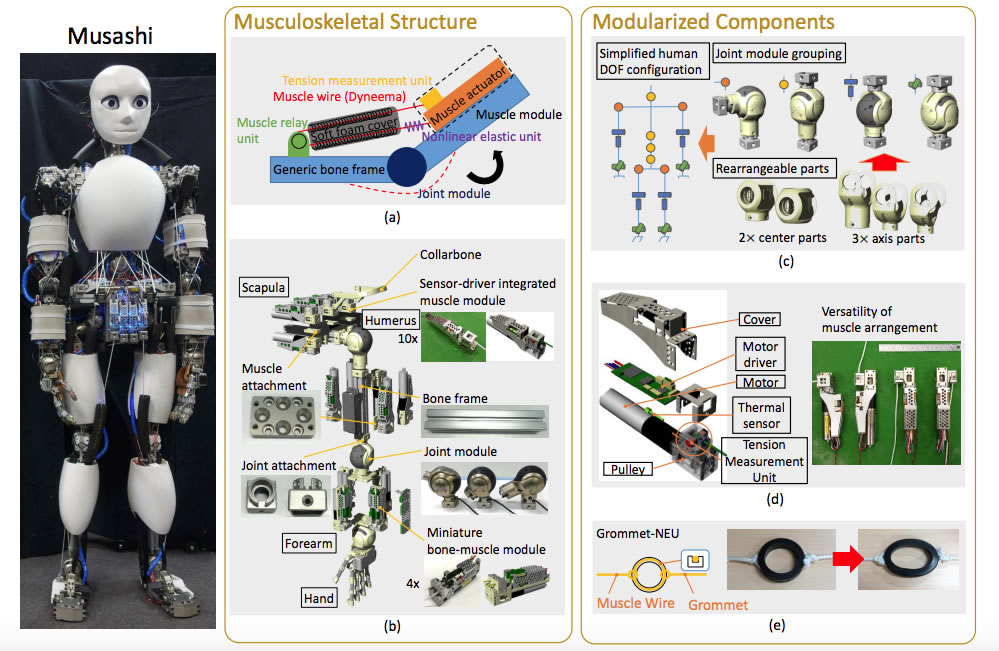
Le caratteristiche del robot chiamato Musashi sono: la ripartizione delle articolazioni e la lunghezza di ogni osso per adattarle alle proporzioni degli esseri umani, il collegamento dei moduli muscolari alle ossa, la disposizione di un’unità elastica non lineare (NEU) all’estremità dei muscolo, la creazione di un impianto che include il modulo in grado di misurare la lunghezza, la tensione e la temperatura dei muscoli, mani flessibili con sensori di contatto, occhi mobili con telecamere ad alta risoluzione e sensori di forza a 6 assi.
ll NEU è costruito solo con gomma e Dyneema (una fibra di polietilene ad altissimo peso molecolare molto forte che offre estrema leggerezza e massima resistenza, ndr) assicurando flessibilità al contatto.
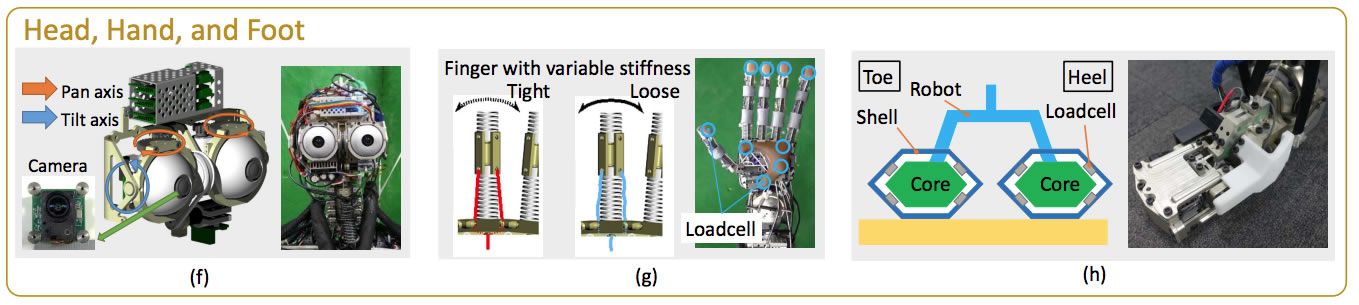
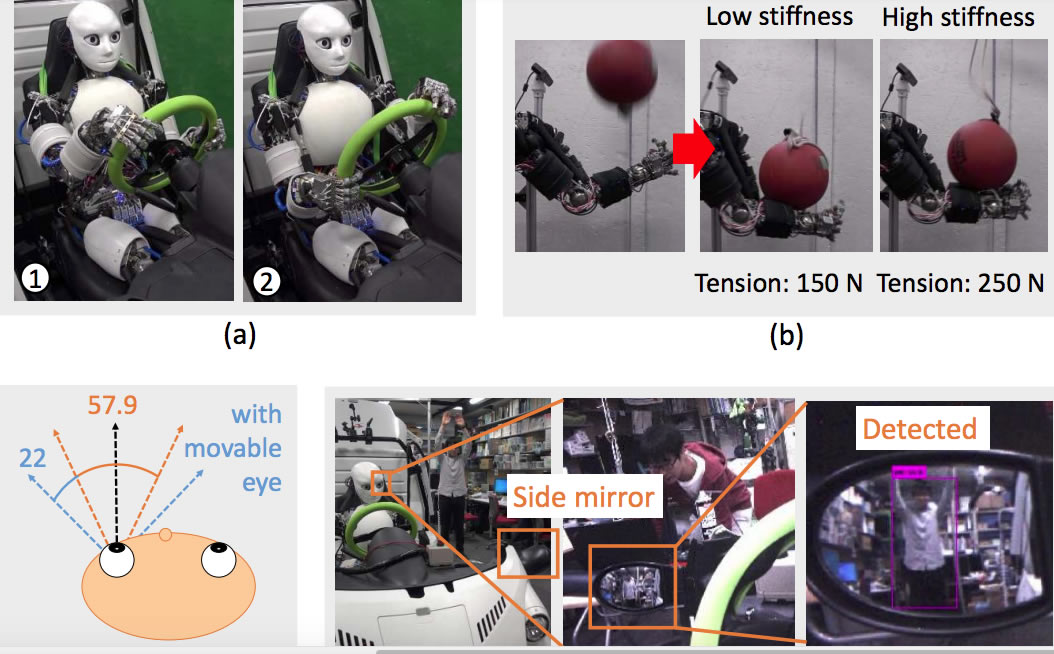
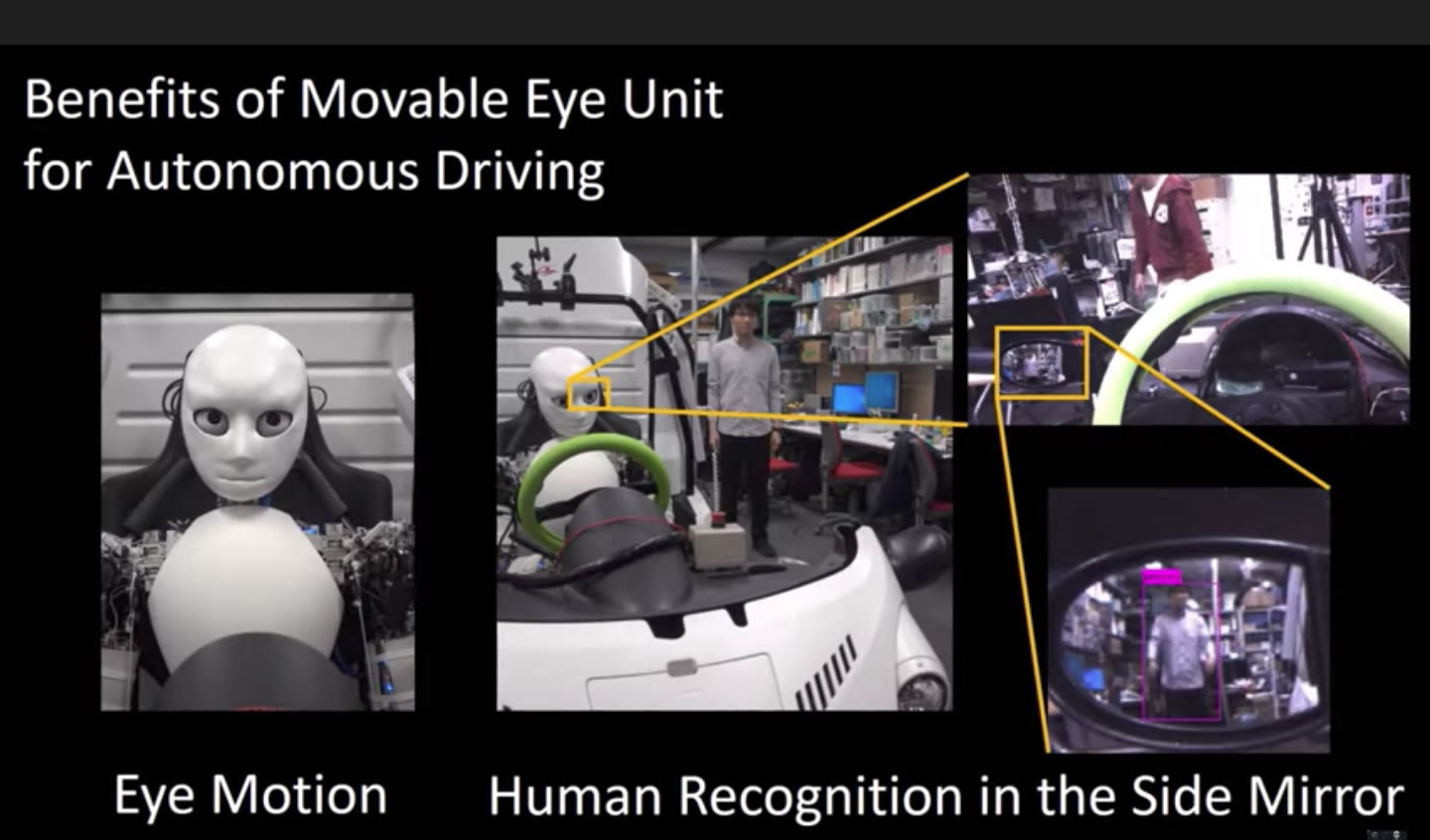
L’unità oculare mobile comprende un giunto panoramico in ciascun occhio ed un giunto inclinabile per far riconoscere persone ed oggetti con un ampio campo visivo.

Gli studiosi hanno valutato l’utilizzo di Lidar/Radar, preferendo una telecamera DFK-AFUJ003 di ImagingSource come occhi per l’opportunità di cambiare la risoluzione dell’immagine, la messa a fuoco, l’esposizione ed altri normali parametri di un dispositivo di questo genere.
La mano non si rompe nemmeno se colpita da un martello grazie all’elevata flessibilità. I muscoli sono posizionati in modo antagonistico sulle falangi prossimali, prima falange, di ciascun dito e la rigidità può essere modificata tirando i muscoli e comprimendo le molle. Nove celle di carico sono disposte sui polpastrelli e sul palmo di ciascuna mano e da esse è possibile misurare la forza di contatto.
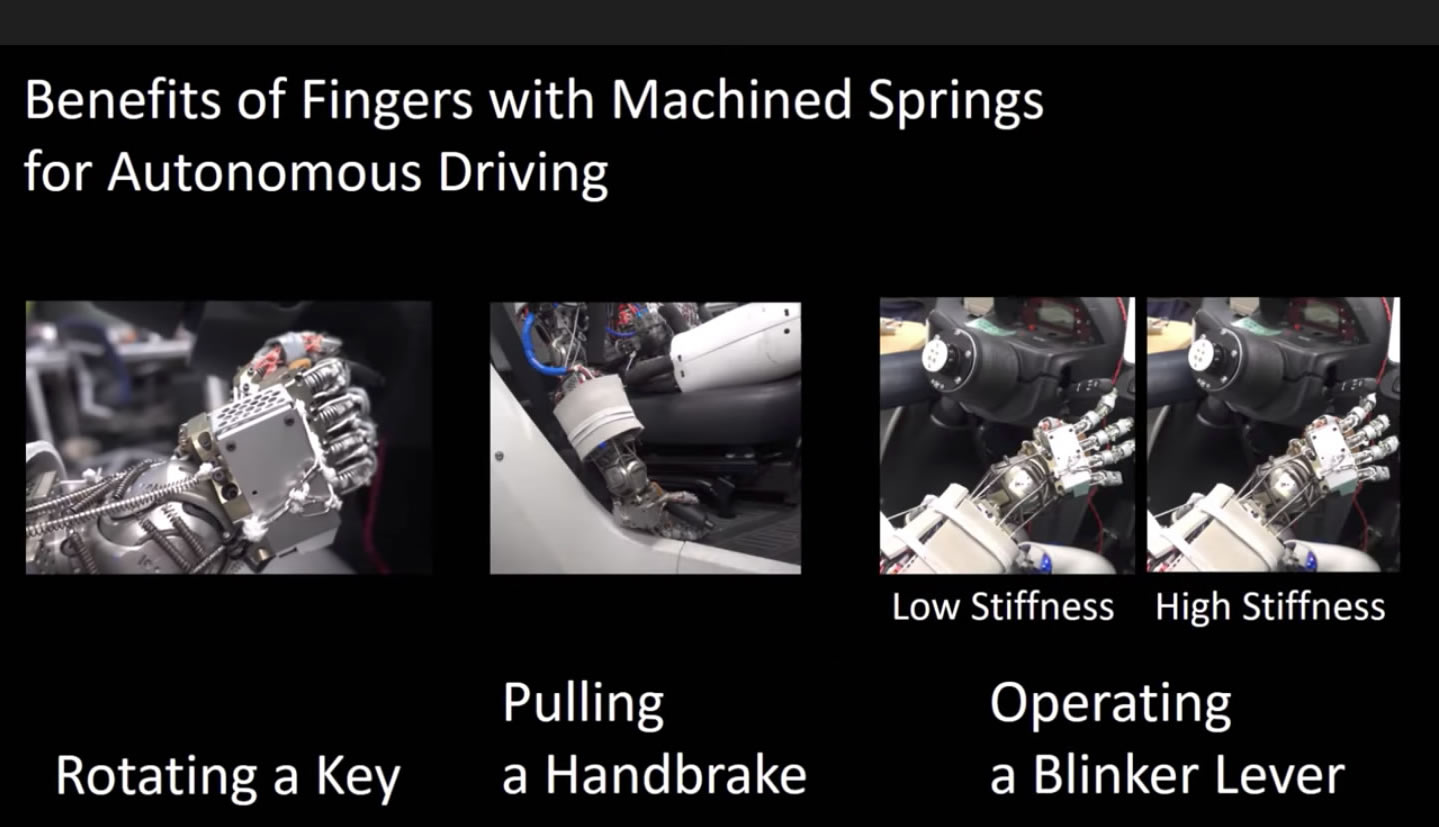
ll robot può adattare la forma della presa a varie situazioni, come ruotare la chiave d’avviamento, tirare il freno a mano, azionare le luci d’emergenza.
Il piede di Musashi ha sensori di forza core-shell a sei assi sulla punta e sul tallone. Il design core-shell è composto da un nucleo (core) interno ed uno strato (shell) esterno per migliorare la sensibilità e la resistenza del sensore.
Utilizzando la capacità del piede di misurare la forza applicata alla sua intera superficie, il robot riesce a recuperarlo quando scivola durante l’azionamento del pedale del freno.
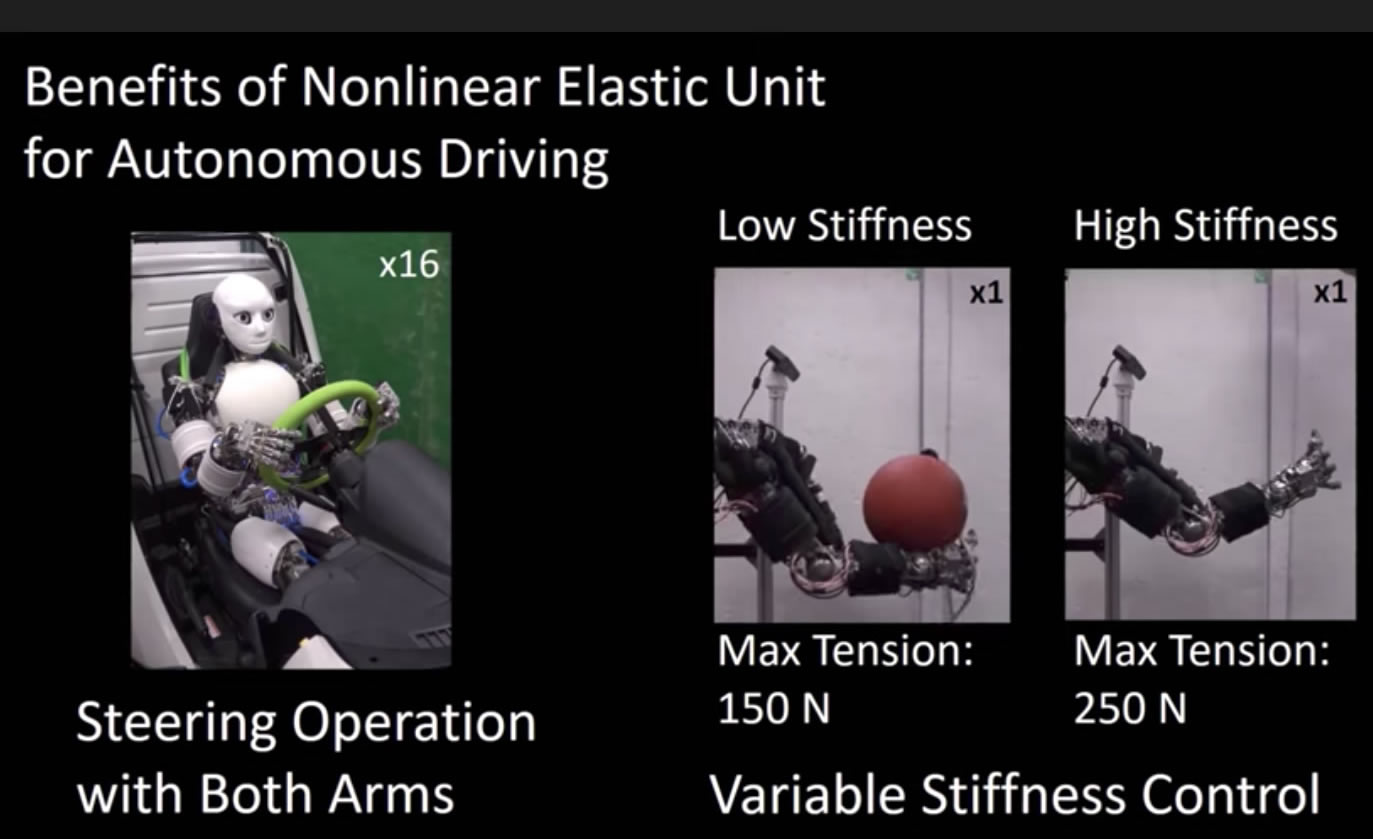
Quando si lascia cadere una palla di 5 kg sul robot da 1 m di altezza, la tensione muscolare massima è di 150 N con rigidità bassa e 250 N con rigidità elevata.
Questi valori assomigliano all’aumento della rigidità del braccio umano durante un incidente automobilistico consentendo l’uso di Musashi come manichino per i crash test.
Nel video su YouTube si vede come la vettura proceda lentamente. La guida autonoma effettiva richiede adattamenti e funzionamenti rapidi in situazioni pericolose, insieme al rilevamento di anomalie nei componenti hardware e la loro gestione.
RIPRODUZIONE RISERVATA – © 2024 SHOWTECHIES – Quando la Tecnologia è spettacolo™ – E’ vietata la riproduzione e redistribuzione, anche parziale, dell’articolo senza autorizzazione scritta. Se desideri riprodurre i contenuti pubblicati, contattaci.
Immagini: JSK – Kento Kawaharazuka


Commenta per primo